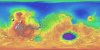
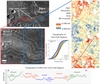
This is a shaded relief of the original DEM described next. This data product, now at version 2, is a blend of digital elevation model (DEM) data derived from the Mars Orbiter Laser Altimeter (MOLA),…
Product Information: This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) (Smith, et al., 2001), an instrument on NASA’s Mars Global Surveyor (MGS) spacecraft (Albee, et al.,…
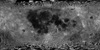
Product Information: This product represents a near-global lunar topography from stereo image data acquired by the Wide-angle Camera (WAC) of the Lunar Reconnaissance Orbiter Camera (LROC) system…
Product Information: This near-global mosaic was generated using data from the SELenological and Engineering Explorer (SELENE) “Kaguya” Terrain Camera (TC) instrument. TC source data originated…
Product Information: This set of archive volumes contains digital scanned versions of original film photographs of rock, soil, and core samples collected from the lunar surface during the Apollo 11,…
NASA's Mars Global Surveyor spacecraft contained the Mars Orbiter Camera, which had a wide-angle (MOC-WA) system sensitive to narrow, 50 nm-wide ranges of purple ('blue') and orange ('red') light. …
This archive contains topography and photometric data generated by the Gaskell Stereophotoclinometry (SPC) software suite. It focuses on six regions on the Moon. These include wrinkle ridges at Dorsa…
These water maps and their ancillary data were prepared for studying the effects of Earth's magnetotail on the formation of the lunar surface water by Dr. Shuai Li at University of Hawaii. It is…
We describe USGS topomapping of Mars at resolutions from 100 m to 30 µm with data from the latest spacecraft missions. Analysis of NASA 2001 Mars Odyssey Thermal Emission Imaging System (THEMIS)…
In January 2004 the first European interplanetary spacecraft, Mars Express, was inserted successfully into a Martian orbit. The multiline scanner HRSC (High Resolution Stereo Camera) on board of…
This paper presents the technology and experimental results for high-precision landing-site mapping and rover localization developed for the ongoing 2003 Mars Exploration Rover (MER) mission. This…
Our project aims to automate Mars mapping and localization using robotic stereo and descent imagery. Stereo vision is a wellstudied domain. However, most efforts aim only at a general scene; little…
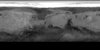
In a previous research effort a terrain partition framework was defined allowing the partition of the landscape of Valles Marineris chasma (an elongated steep-sided depression located in Mars) to…
Following the conceptual idea "from 3D camera to 3D view", the production of true-3D image maps for the glasses-free stereoviewing of parts of the Martian surface, is described. The image data have…
In general, maps should answer a very simple question of its reader: "what's there" and „where is something”? For planetary maps, the answer is more difficult, because (1) in some cases even map…
The High Resolution Stereo Camera (HRSC) on board of the European space mission Mars Express provides multispectral digital image data in high resolution as well as the systematic stereo coverage of…
CHARACTERIZATION OF IMPACT EJECTA DEPOSITS FROM METEOR CRATER, ARIZONA. T. A. Gaither, J. J. Hagerty, J. F. McHone, and H. E. Newsom, U.S. Geological Survey, Astrogeology Science Center, 2255 N.…
MULTI-DIMENSIONAL CHARACTERIZATION OF IMPACT EJECTA DEPOSITS FROM METEOR CRATER, AZ. T. A. Gaither, J. J. Hagerty, S. E. Clark, T. M. Hare, R. K. Hayward, H. E. Newsom, S. P. Wright, and J. McHone,…