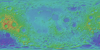
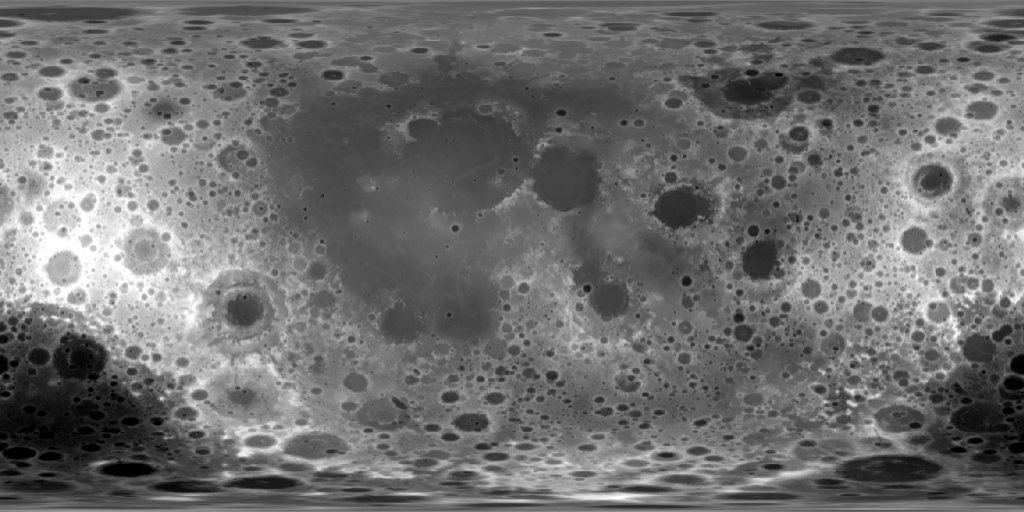
Moon LRO LOLA DEM 118m
- Primary Authors
- LOLA Science Team
- Originators
- Goddard Space Flight Center
- Publisher
- USGS Astrogeology Science Center
- Publication Date
- 2014-03-11
- Abstract
- Product Information: This digital elevation model (DEM) is based on data from the Lunar Orbiter Laser Altimeter (LOLA; Smith et al., 2010), an instrument on the National Aeronautics and Space Agency (NASA) Lunar Reconnaissance Orbiter (LRO) spacecraft (Tooley et al., 2010). The created DEM represents more than 6.5 billion measurements gathered between July 2009 and July 2013, adjusted for consistency in the coordinate system described below, and then converted to lunar radii (Mazarico et al., 2012). Elevations were computed by subtracting the lunar reference radius of 1737.4 km from the surface radius measurements (LRO Project and LGCWG, 2008; Archinal et al., 2011). Thus elevation values are the distance above or below the reference sphere. The average accuracy of each point after crossover correction is better than 20 meters in horizontal position and ~1 meter in radius (Mazarico et al., 2012). The measurements were converted into a DEM (Neumann et al., 2011) using Generic Mapping Tools software (Wessel & Smith, 2008), with a resolution of 256 pixels per degree. In projection, the pixels are 118 meters in size at the equator. Gaps between tracks of 1-2 km are common, and some gaps of up to 4 km occur near the equator. DEM points located in these gaps in LOLA data were filled by interpolation Smith et al., 2010). Mission and Instrument Information: The U.S. National Aeronautics and Space Administration (NASA) launched the Lunar Reconnaissance Orbiter (LRO) spacecraft to the Moon in June 2009 (Tooley et al., 2010) carrying a variety of instruments that continue to return high-resolution images of the lunar surface from its eccentric polar mapping orbit (Petro et al., 2019). The LOLA has collected over more than 6.5 billion measurements of global surface height with a vertical precision of ~10 cm and an accuracy of ~1m (Mazarico et al., 2013). With such highly accurate global coverage, the resulting topographic map has become the reference geodetic framework for the lunar community and has led to the highest resolution and most accurate polar DEMs to date (Barker et al., 2016). Note this file is stored using 16bit signed integer with a defined "scaler=0.5" and "offset=0" in the GeoTIFF label. This means all pixel values should be divided by 2. So: Lunar elevation (m) = pixel_DN * 0.5 + 0.0 Some applications like QGIS will automatically scale the data for the user. Other applications, like ArcGIS Pro will not. You can apply the scale in the raster calculator or using GDAL tools. Using GDAL, you could run: > gdal_translate -ot Float32 -unscale Lunar_LRO_LOLA_Global_LDEM_118m_Mar2014.tif LOLA_LDEM_118m_Mar2014_unscale.tif References: Archinal, B. A., A'Hearn, M. F., Bowell, E., Conrad, A., Consolmagno, G. J., Courtin, R., Fukushima, T., et al. (2011). Report of the IAU Working Group on cartographic coordinates and rotational elements: 2009. Celestial Mechanics and Dynamical Astronomy, 109 (2), 101-135. https://doi.org/10.1007/s10569-010-9320-4 Barker, M. K., Mazarico, E., Neumann, G. A., Zuber, M. T., Haruyama, J., & Smith, D. E. (2016). A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus, 273, 346-355. https://doi.org/10.1016/j.icarus.2015.07.039 Davies, M. E., & Colvin, T. R. (2000). Lunar coordinates in the regions of the Apollo landers. Journal of Geophysical Research, 105(E8), 20277-20280. https://doi.org/10.1029/1999JE001165 Folkner, W. M., Williams, J. G., & Boggs, D. H. (2008). The Planetary and Lunar Ephemeris DE 421. JPL Memorandum IOM 343R-08-003, 31 March. ftp://ssd.jpl.nasa.gov/pub/eph/planets/ioms/de421.iom.v1.pdf Folkner, W. M., Williams, J. G., & Boggs, D. H. (2009). The Planetary and Lunar Ephemeris DE 421. IPN Progress Report 42-178, August 15. http://ipnpr.jpl.nasa.gov/progress_report/42-178/178C.pdf Greeley, R., & Batson, R. M. (1990). Planetary mapping. (ISBN 0-521-30774-0, pp. 274-275). New York, NY: Cambridge University Press. LRO Project and Lunar Geodesy and Cartography Working Group (2008). A standardized lunar coordinate system for the Lunar Reconnaissance Orbiter and lunar datasets: LRO Project and LGCWG White Paper, version 5 of October 1. http://lunar.gsfc.nasa.gov/library/LunCoordWhitePaper-10-08.pdf Mazarico, E., Rowlands, D. D., Neumann, G. A., Smith, D. E., Torrence, M. H., Lemoine, F. G., & Zuber, M. T. (2012). Orbit determination of the Lunar Reconnaissance Orbiter. Journal of Geodesy, 86-(3), 193-207. https://doi.org/10.1007/s00190-011-0509-4 Neumann, G. A. (2011). Lunar Reconnaissance Orbiter Lunar Orbiter Laser Altimeter reduced data record and derived products software interface specification, version 2.42, LRO-L-LOLA-4- GDR-V1.0, NASA Planetary Data System (PDS). https://pds-geosciences.wustl.edu/lro/lro-l-lola-3-rdr-v1/lrolol_1xxx/document/rdrsis.pdf Petro, N. E., Keller, J. W., Cohen, B. A., & McClanahan, T. P. (2019). Ten years of the Lunar Reconnaissance Orbiter: Advancing lunar science and context for future lunar exploration. Paper presented at the 50th Lunar and Planetary Science Conference, Lunar and Planetary Institute, Houston, TX. https://www.hou.usra.edu/meetings/lpsc2019/pdf/2780.pdf Smith, D. E., Zuber, M. T., Neumann, G. A., Lemoine, F. G., Torrence, M. H., McGarry, J. F., Rowlands, D. D., et al. (2010). Initial observations from the Lunar Orbiter Laser Altimeter (LOLA). Geophysical Research Letters, 37(18). https://doi.org/10.1029/2010GL043751 Smith, D. E., Zuber, M. T., Neumann, G. A., Mazarico, E., Head III, J., Torrence, M. H., & LOLA Science Team (2011). Results from the Lunar Orbiter Laser Altimeter (LOLA): global, high-resolution topographic mapping of the Moon. Paper presented at the 42nd Lunar and Planetary Science Conference, Lunar and Planetary Institute, Houston, TX. https://www.lpi.usra.edu/meetings/lpsc2011/pdf/2350.pdf Tooley, C. R., Houghton, M. B., Saylor Jr., S. S., Peddie, C., Everett, D. F., Baker, C. L., & Safdie, K. N. (2010). Lunar Reconnaissance Orbiter mission and spacecraft design. Space Science Review, 150, 23â62. https://doi.org/10.1007/s11214-009-9624-4 Wessel, P., & Smith, W. H. F. (1998). New, improved version of Generic Mapping Tools released. Eos, Transactions of the American Geophysical Union, 79(47), 579. https://doi.org/10.1002/2013EO450001 Williams, J. G., Boggs, D. H., & Folkner, W. M. (2008). DE421 Lunar Orbit, Physical Librations, and Surface Coordinates. JPL Interoffice Memorandum IOM 335-JW,DB,WF-20080314-001, 14 March. ftp://ssd.jpl.nasa.gov/pub/eph/planets/ioms/de421_moon_coord_iom.pdf
- Purpose
- To create a preliminary elevation model for the Moon.
Contact and Distribution
- Format
- Digital Elevation Model, Remote-sensing Data, Topographic Map
- Access Constraints
- public domain
- Access Scope
- PDS
- Use Constraints
- Please cite authors
- Edition
- March 11, 2014
- Supplemental Information
- https://lola.gsfc.nasa.gov/, https://ode.rsl.wustl.edu/moon/, http://pds-geosciences.wustl.edu/missions/lro/lola_faq.htm, http://pds-geosciences.wustl.edu/lro/lro-l-lola-3-rdr-v1/lrolol_1xxx/catalog/lolainst.cat, http://pds-geosciences.wustl.edu/missions/lro/default.htm
- Native Data Set Environment
- ISIS v3
- Astrogeology Theme
- Image Processing, Remote Sensing, Topography
- Mission Names
- Lunar Reconnaissance Orbiter
- Instrument Names
- LOLA
- Online Package Link
- https://astrogeology.usgs.gov/search/map/moon_lro_lola_dem_118m
- External File Size
- 8 GB
- Online File Link
- https://planetarymaps.usgs.gov/mosaic/Lunar_LRO_LOLA_Global_LDEM_118m_Mar2014.tif
- Contact Address
- 2255 N. Gemini Drive
- Contact City
- Flagstaff
- Contact State
- AZ
- Contact Postal Code
- 86001
- Contact Email
- [email protected]
Data Status and Quality
- Time Period of Content (start)
- 2009-07-13
- Time Period of Content (stop)
- 2013-07-18
- Currentness Reference
- Ground condition
- Progress
- In Work
- Update Frequency
- As needed
- Logical Consistency
- The LOLA data were initially referenced to an internally consistent inertial coordinate system, derived from tracking of the LRO spacecraft. By adopting appropriate values for the orientation of the Moon as defined by the International Astronomical Union (IAU, Archinal and others, 2011), these inertial coordinates were converted into the planet-fixed coordinates (longitude and latitude) used on this map. The coordinate system defined for this product is the mean Earth/polar axis (ME) system. The ME system, sometimes called the mean Earth/rotation axis system, is the method most often used for cartographic products of the past (Davies and Colvin, 2000). Values for the orientation of the Moon were derived from the JPL DE/LE 421 planetary ephemeris (Williams and others, 2008; Folkner and others, 2008, 2009), rotated into the ME system. Longitude increases to the east and latitude is planetocentric as allowed in accordance with current international and NASA standards (Archinal and others, 2011; LRO Project and LGCWG, 2008). The intersection of the lunar equator and prime meridian occurs at what can be called the Moon's mean sub-Earth point. The concept of a lunar sub-Earth point derives from the fact that the Moon's rotation is tidally locked to the Earth. The actual sub-Earth point on the Moon varies slightly due to orbital eccentricity, inclination, and other factors, so a mean sub-Earth point is used to define the point on the lunar surface where longitude equals 0°. This point does not coincide with any prominent crater or other lunar surface feature (Archinal and others, 2011; LRO Project and LGCWG, 2008).
- Completeness Report
- Gaps between tracks of 1-2 km are common, and some gaps of up to 4 km occur near the equator. DEM points located in these gaps in LOLA data were filled by interpolation (Smith and others, 2011). The high and low elevations in the DEM are approximate because of the interpolation process used.
- Process Description
- The LOLA measurements were converted into a digital elevation model (DEM; Neumann and others, 2010) using Generic Mapping Tools software (Wessel and Smith, 1998), with a resolution of 256 pixels per degrees. In projection, the pixels are 118 meters in size at the equator. PRODUCT_CREATION_TIME = 2014-03-11T00:00:00
- Source Title
- The LOLA Data Node
- Source Online Linkage
- {http://pds-geosciences.wustl.edu/lro/lro-l-lola-2-edr-v1/lrolol_0xxx/data/lola_edr/,https://pds-imaging.jpl.nasa.gov/volumes/lro.html,http://pds-geosciences.wustl.edu/missions/lro/lola.htm,https://pds-imaging.jpl.nasa.gov/portal/lro_mission.htm}
- PDS Status
- PDS 3 Archived
- Attribute Accuracy Report
- Best Effort
- Horizontal Positional Accuracy Report
- Best Effort
- Vertical Positional Accuracy Report
- Best Effort
Geospatial Information
- Target
- Moon
- System
- Earth
- Minimum Latitude
- -90
- Maximum Latitude
- 90
- Minimum Longitude
- -180
- Maximum Longitude
- 180
- Direct Spatial Reference Method
- Raster
- Object Type
- Grid Cell
- Raster Row Count (lines)
- 46080
- Raster Column Count (samples)
- 92160
- Bit Type (8, 16, 32)
- 16
- Quad Name
- Radius A
- 1737400
- Radius C
- 1737400
- Bands
- 1
- Pixel Resolution (meters/pixel)
- 118.4505876
- Scale (pixels/degree)
- 256
- Map Projection Name
- Simple Cylindrical
- Latitude Type
- Planetocentric
- Longitude Direction
- Positive East
- Longitude Domain
- -180 to 180