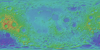
Moon LRO LOLA - SELENE Kaguya TC DEM Merge 60N60S 59m
- Primary Authors
- LOLA Team and Kaguya Team
- Originators
- Planetary Data System
- Publisher
- USGS Astrogeology Science Center
- Publication Date
- 2015-02-04
- Abstract
- Product Information: The Lunar Orbiter Laser Altimeter (LOLA) and SELenological and Engineering Explorer (SELENE) Kaguya Teams have created an improved lunar digital elevation model (DEM) covering latitudes within ±60°, at a horizontal resolution of 512 pixels per degree (~59 meters per pixel [m] at the equator) and a typical vertical accuracy ~3 to 4 m. This DEM is constructed from ~4.5x109 geodetically-accurate elevation heights from the LOLA, to which we co-registered 43,200 stereo-derived DEMs (each 1°x1°) from the TC (~1010 pixels total). After co-registration, approximately 90% of the TC DEMs show root-mean-square vertical residuals with the LOLA data of <5 m compared to ~50% prior to co-registration. We use the co-registered TC data to estimate and correct orbital and pointing geolocation errors from the LOLA altimetric profiles (typically amounting to <10 m horizontally and <1 m vertically). By combining both co-registered datasets, we obtain a near-global DEM with high geodetic accuracy and without the need for surface interpolation. We evaluate the resulting LOLA + TC merged DEM (designated as "SLDEM2015") with particular attention to quantifying seams and crossover errors. Map values are referred to a radius of 1,737,400 m. Mission and Instrument Information: The U.S. National Aeronautics and Space Administration (NASA) launched the Lunar Reconnaissance Orbiter (LRO) spacecraft to the Moon in June 2009 (Tooley et al., 2010) carrying a variety of instruments that continue to return high-resolution images of the lunar surface from its eccentric polar mapping orbit (Petro et al., 2019). The LOLA has collected over more than 6.5 billion measurements of global surface height with a vertical precision of ~10 cm and an accuracy of ~1m (Mazarico et al., 2013). With such highly accurate global coverage, the resulting elevation map has become the reference geodetic framework for the lunar community and has led to the highest resolution and most accurate polar DEMs to date (Barker et al., 2016). The Japan Aerospace Exploration Agency (JAXA) launched the SELENE Kaguya spacecraft to the Moon in September 2007. The mission concluded June 10, 2009 when the spacecraft was intentionally crashed onto the lunar surface. Subsequent data collection and mapping efforts resulted in "the largest lunar exploration project since the Apollo program" (Haruyama et al., 2008). The high-performance optical TC, a 10-meter spatial resolution stereo-camera, was part of the Lunar Imager/Spectrometer (LISM) instrument suite (Kato et al., 2006), along with the Multi-band Imager (MI, 20 m; (Ohtake et al., 2008)) and Spectral Profiler (SP; Matsunaga et al., 2008). SELENE is a Japanese mission developed and operated by JAXA. Please credit NASA's LOLA Team and JAXA's SELENE/Kaguya Team. References: Barker, M. K., Mazarico, E., Neumann, G. A., Zuber, M. T., Haruyama, J., & Smith, D. E. (2016). A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus, 273, 346-355. https://doi.org/10.1016/j.icarus.2015.07.039Earth Planets Space, 60, 243-255. https://doi.org/10.1186/BF03352788 Kato, M., Takizawa, Y., Sasaki, S., & SELENE Project Team (2006). The SELENE Mission: Present status and science goals. Paper presented at the 38th Lunar and Planetary Science Conference, Lunar and Planetary Institute, Houston, TX. https://www.lpi.usra.edu/meetings/lpsc2007/pdf/1211.pdf Matsunaga, T., Ohtake, M., Haruyama, J., Ogawa, Y., Nakamura, R., Yokota, Y., Morota, T., et al. (2008). Discoveries on the lithology of lunar crater central peaks by SELENE Spectral Profiler. Geophysical Research Letters, 35(L23201). https://doi.org/10.1029/2008GL035868 Mazarico, E., Rowlands, D. D., Neumann, G. A., Smith, D. E., Torrence, M. H., Lemoine, F. G., & Zuber, M. T. (2012). Orbit determination of the Lunar Reconnaissance Orbiter. Journal of Geodesy, 86(3), 193-207. https://doi.org/10.1007/s00190-011-0509-4 Ohtake, M., Haruyama, J., Matsunaga, T., Yokota, Y., Morota, T., Honda, C., & LISM Team (2008). Performance and scientific objectives of the SELENE (KAGUYA) Multiband Imager. Earth Planets Space, 60, 257-264. https://doi.org/10.1186/BF03352789 Petro, N. E., Keller, J. W., Cohen, B. A., & McClanahan, T. P. (2019). Ten years of the Lunar Reconnaissance Orbiter: Advancing lunar science and context for future lunar exploration. Paper presented at the 50th Lunar and Planetary Science Conference, Lunar and Planetary Institute, Houston, TX. https://www.hou.usra.edu/meetings/lpsc2019/pdf/2780.pdf Tooley, C. R., Houghton, M. B., Saylor Jr., S. S., Peddie, C., Everett, D. F., Baker, C. L., & Safdie, K. N. (2010). Lunar Reconnaissance Orbiter mission and spacecraft design. Space Science Reviews, 150(1), 23-62. https://doi.org/10.1007/s11214-009-9624-4
- Purpose
- This product was produced to generate a high-resolution global elevation model and geodetic framework that enables precise targeting, safe landing, and surface mobility to carry out exploratory activities. It can characterize the polar illumination environment, and images permanently shadowed polar regions of the Moon to identify possible locations of surface ice crystals in shadowed polar craters.
Contact and Distribution
- Format
- Digital Elevation Model, Remote-sensing Data, Topographic Map
- Access Constraints
- public domain
- Access Scope
- PDS
- Use Constraints
- Please cite authors
- Edition
- Feburary 4, 2015
- Edition Name
- SLDEM
- Supplemental Information
- https://lola.gsfc.nasa.gov/, https://www.sciencedirect.com/science/article/pii/S0019103515003450?via%3Dihub, https://www.sciencedirect.com/science/article/pii/S0019103513002108, http://jda.jaxa.jp/en/service.php, https://pds-imaging.jpl.nasa.gov/documentation/PDS_KaguyaData_Jan.31.11.pdf, https://pds-imaging.jpl.nasa.gov/portal/lro_mission.html, https://pds-imaging.jpl.nasa.gov/portal/kaguya_mission.html, https://pds-imaging.jpl.nasa.gov/documentation/LISM-SPICE_Format_en_V01.3.pdf, https://pds-imaging.jpl.nasa.gov/documentation/LALT_Format_en_V01.pdf
- Native Data Set Environment
- GDAL, ISIS v3
- Astrogeology Theme
- Photogrammetry, Remote Sensing, Topography
- Mission Names
- Kaguya, Lunar Reconnaissance Orbiter
- Instrument Names
- LOLA, TC
- Online Package Link
- https://astrogeology.usgs.gov/search/map/moon_lro_lola_selene_kaguya_tc_dem_merge_60n60s_59m
- External File Size
- 22 GB
- Online File Link
- https://planetarymaps.usgs.gov/mosaic/LolaKaguya_Topo/Lunar_LRO_LOLAKaguya_DEMmerge_60N60S_512ppd.tif
- Contact Address
- 2255 N. Gemini Drive
- Contact City
- Flagstaff
- Contact State
- AZ
- Contact Postal Code
- 86001
- Contact Email
- [email protected]
- Currentness Reference
- Publication date
- Progress
- Complete
- Update Frequency
- As needed
- Logical Consistency
- To reduce the presence of the largest seams, the team replaced the most poorly fit ∼1% of tiles with the original LOLA-only DEMs with interpolation to fill gaps.
- Completeness Report
- Only available from -60 to 60 degrees in latitude
- Process Description
- Errors in the TC tiles result from imperfect knowledge of the Kaguya orbit, as well as errors in camera pointing, focal length, flat-field, distortion, and jitter. Offsets in the LOLA profiles are due largely to orbit uncertainties and errors in the laser boresight model. To isolate these error sources, the authors followed a two-step approach when co-registering the TC tiles to the LOLA data. In step (1), they derived a 5-parameter coordinate transformation between every TC tile and the full resolution LOLA data in that tile (unbinned point cloud with ∼100,000 points). Given the large number of individual profiles (typically ∼70 per tile), they expected the LRO/LOLA orbital and pointing errors to average out to very nearly zero in any given tile given they are uncorrelated over the ∼4 years of acquisition. Thus, the tile-averaged transformation parameters compensate predominantly for the Kaguya/TC orbital, pointing, and camera model errors. In step (2), they fit a 3-dimensional (3D) offset to each LOLA profile segment in the transformed TC tile. These offsets reflect primarily the LOLA geolocation errors described above with a secondary contribution from Kaguya/TC errors not completely removed by the transformation in step (1) due to the low number of degrees of freedom.
Lineage
- Process Date
- 2015-02-04
- Source Online Linkage
- {http://pds-geosciences.wustl.edu/lro/lro-l-lola-3-rdr-v1/lrolol_1xxx/data/sldem2015/, http://darts.isas.jaxa.jp/planet/pdap/selene/index.html.en, http://pds-geosciences.wustl.edu/missions/lro/lola.htm, http://www.kaguya.jaxa.jp/index_e.htm}
- PDS Status
- PDS 3 Archived
- Attribute Accuracy Report
- Accurate to Control Net
- Horizontal Positional Accuracy Report
- Accurate to Control Net
- Vertical Positional Accuracy Report
- Accurate to Control Net
Geospatial Information
- Target
- Moon
- System
- Earth
- Minimum Latitude
- -60
- Maximum Latitude
- 60
- Minimum Longitude
- -180
- Maximum Longitude
- 180
- Direct Spatial Reference Method
- Raster
- Object Type
- Grid Cell
- Raster Row Count (lines)
- 61440
- Raster Column Count (samples)
- 184320
- Bit Type (8, 16, 32)
- 16
- Quad Name
- Radius A
- 1737400
- Radius C
- 1737400
- Control Net
- LOLA
- Bands
- 1
- Pixel Resolution (meters/pixel)
- 59.2252938
- Scale (pixels/degree)
- 512
- Vertical Coordinate System Units
- Meters
- Map Projection Name
- Equirectangular
- Latitude Type
- Planetocentric
- Longitude Direction
- Positive East
- Longitude Domain
- -180 to 180