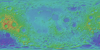
Moon Apollo 17 LROC NAC Landing Site Orthomosaic 50cm
- Primary Authors
- Technical University Berlin (TUB)
- Originators
- German Aerospace Center (DLR), LROC Team
- Publisher
- USGS Astrogeology Science Center
- Publication Date
- 2018-05-01
- Abstract
- Product Information: This is an (ortho-) mosaic map of the Apollo 17 landing site (L15K 20.2/30.7East COMT). The map includes nomenclature, elevation contours, the astronauts' major geology stops, and rover traverses. It covers an area of about 14 km x 12 km of the Taurus-Littrow Valley, from 30.4294°E to 30.9162°E in longitude and from 19.9771°N to 20.3639°N in latitude. The image component of the map is an orthomosaic (0.5 meters per pixel [m]) that was created from images provided by the Lunar Reconnaissance Orbiter Camera (LROC) Narrow Angle Camera (NAC). Orthorectification of the images was based on a DEM (1.5 m) which was processed from LROC NAC stereo pairs. The DEM was also used to derive elevation contour lines, which were included in the map to indicate topography. The DEM and the orthomosaic are available as related products. We also determined the locations from where the Apollo 17 astronauts acquired station panoramas, and where they deployed ALSEP instruments. For this, we jointly analyzed the on-site Hasselblad photographs and the LROC NAC orthomosaic and registered the surface images to the orbital image. The determined camera and instrument positions were mapped in large scale station maps and are provided as ancillary cartographic products. More details on the localization approach and the station maps are provided by Haase et al. (2018). Please note that all files, including original PDF, PDS3 images, and all GIS files are available for download within the file "Apollo17_PDS_fullPackage_Haase.zip " listed under ancillary products (right side). DEM Information: This is a digital elevation model (DEM/DTM) of the Apollo 17 landing site generated from stereo images provided by the Lunar Reconnaissance Orbiter Camera (LROC) Narrow Angle Camera (NAC). Four LROC NAC stereo image pairs at pixel scales of 0.5 meters per pixel (m) and stereo angles ranging from about 25° to 30° were combined to one DEM. A 200 m wide gap extending in the along-track direction at 30.7°E was filled using a fifths stereo image pair with lower image resolution (1.0 m) and low stereo quality. The output DEM has a resolution of 1.5 m and was registered horizontally to the Mean Earth/Polar Axis-coordinates of the ALSEP central station (Davies & Colvin, 2000), and vertically to LRO's Lunar Orbiter Laser Altimeter (LOLA) data. Elevation values are in meters and referred to a radius of 1737.4 km. Stereo image pairs used for DEM creation (img1/img2): M137346262/M137353046; M159746082/M159752868; M190394800/M190401948; M134985003/M134991788; M152669024/M152675807 Mission and Instrument Information: The Apollo 17 mission provided the scientific world with the best lunar sample return in both potential quantity of information and variety of sample types (NASA, 1972). Eugene Cernan, commander of Apollo 17, still holds the distinction of being the last man to walk on the Moon, as no humans have visited the Moon since December 14, 1972. Apollo 17 hosted the first scientist-astronaut to land on moon: Harrison Schmitt. The lunar rover vehicle traversed a total of 30.5 kilometers. Lunar surface-stay time was 75 hours, and lunar orbit time 17 hours. Astronauts gathered 110.4 kilograms, or 243 pounds, of material (NASA, 2018). The lunar landing site was the Taurus-Littrow highlands and valley area, which was picked for Apollo 17 as a location where rocks both older and younger than those previously returned from other Apollo missions, as well as from Luna 16 and 20 missions, might be found. From the standpoint both of geologic features and of samples returned, the Taurus-Littrow region represents the most diverse landing site of the Apollo missions (NASA, 1973). The U.S. National Aeronautics and Space Administration (NASA) launched the Lunar Reconnaissance Orbiter (LRO) spacecraft to the Moon in June 2009 (Tooley et al., 2010) carrying a variety of instruments that continue to return high-resolution images of the lunar surface from its eccentric polar mapping orbit (Petro et al., 2019). The Lunar Reconnaissance Orbiter (LRO) is a robotic spacecraft designed to acquire data to prepare for and support future human exploration of the Moon (PDS IMG, 2018). The Lunar Reconnaissance Orbiter Camera (LROC) is a system of three cameras mounted on the Lunar Reconnaissance Orbiter (LRO) that capture high resolution black and white images and moderate resolution multi-spectral images of the lunar surface (ASU, 2019). Two narrow-angle cameras (NACs) on the Lunar Reconnaissance Orbiter Camera (LROC) make high-resolution, black-and-white images of the surface, capturing images of the poles with resolutions down to 1 meter (about 3.3 feet; NASA, 2017). The LROC data sets are produced by the LROC Team at the Tempe campus of Arizona State University (PDS IMG, 2018). References: Arizona State University (ASU) (2019). About Lunar Reconnaissance Orbiter. https://www.lroc.sese.asu.edu Davies, M., & Colvin, T. (2000). Lunar Coordinates in the Regions of Apollo Landers. American Geophysical Union, 105(E8), 20277-20280. https://doi.org/10.1029/1999JE001165 Haase, I., Wählisch, M., Gläser, P., Oberst, J., & Robinson, M. (2018). Coordinates and Maps of the Apollo 17 Landing Site. Earth and Space Science, 6(1), 59-95. https://doi.org/10.1029/2018EA000408 Petro, N. E., Keller, J. W., Cohen, B. A., & McClanahan, T. P. (2019). Ten years of the Lunar Reconnaissance Orbiter: Advancing lunar science and context for future lunar exploration. Paper presented at the 50th Lunar and Planetary Science Conference, Lunar and Planetary Institute, Houston, TX. https://www.hou.usra.edu/meetings/lpsc2019/pdf/2780.pdf Planetary Data Systems (PDS) Cartography and Imaging Sciences (IMG) (2018). Lunar Reconnaissance Orbiter. https://pds-imaging.jpl.nasa.gov/portal/lro_mission.html National Aeronautics and Space Administration (NASA) (2018). Apollo 17. https://www.nasa.gov/mission_pages/apollo/missions/apollo17.html National Aeronautics and Space Administration (NASA) (2017). Lunar Reconnaissance Orbiter. LRO Spacecraft Instruments: Lunar Reconnaissance Orbiter Camera. https://www.nasa.gov/mission_pages/LRO/spacecraft/index.html National Aeronautics and Space Administration (NASA) (1973). Apollo 17 Preliminary Science Report, NASA SP-330. https://www.hq.nasa.gov/alsj/a17/as17psr.pdf National Aeronautics and Space Administration (NASA) (1972). NASA News Press Kit, Release No. 72-220. https://www.hq.nasa.gov/alsj/a17/A17_PressKit.pdf Tooley, C. R., Houghton, M. B., Saylor Jr., S. S., Peddie, C., Everett, D. F., Baker, C. L., & Safdie, K. N. (2010). Lunar Reconnaissance Orbiter mission and spacecraft design. Space Science Review, 150, 23â62. https://doi.org/10.1007/s11214-009-9624-4
- Purpose
- The Apollo 17 landing site map was created for an improved cartographic representation of the exploration site of the astronauts. It provides an improved cartographic context to the on-site experiments and the crew's geologic traverse. It also supports future landings and mission operation.
Contact and Distribution
- Format
- Landing Site Map, Raster Data, Remote-sensing Data, Topographic Map, Traverse Map, Vector Data
- Access Constraints
- None
- Access Scope
- PDS
- Use Constraints
- Please cite authors
- Edition
- 1
- Edition Name
- version
- Supplemental Information
- http://lroc.sese.asu.edu/images/index.php/, http://lroc.sese.asu.edu/featured_sites/lroc_features/Apollo%2017/feature_highlights, https://lunar.gsfc.nasa.gov/index.html
- Native Data Set Environment
- ESRI Arcinfo, GDAL
- Astrogeology Theme
- Cartography, Exploration, Geographic Information System (GIS), Image Processing, Landing sites, Topography
- Mission Names
- Apollo, Lunar Reconnaissance Orbiter
- Instrument Names
- LROC
- Online Package Link
- https://astrogeology.usgs.gov/search/map/moon_apollo_17_lroc_nac_landing_site_orthomosaic_50cm
- External File Size
- 22 MB
- Online File Link
- https://planetarymaps.usgs.gov/mosaic/Apollo17/APOLLO17_15000_RGB_reduced.pdf
- Access Instructions
- Please note that all files, including original PDF, PDS3 images, and all GIS files are available for download within the file "Apollo17_PDS_fullPackage_Haase.zip " listed on ancillary (right side).
- Contact Address
- 2255 N. Gemini Drive
- Contact City
- Flagstaff
- Contact State
- AZ
- Contact Postal Code
- 86001
- Contact Email
- [email protected]
Data Status and Quality
- Time Period of Content (start)
- 2009-10-01
- Time Period of Content (stop)
- 2012-04-30
- Currentness Reference
- Publication date
- Progress
- Complete
- Update Frequency
- None planned
- Logical Consistency
- The orthomosaic is controlled to the Mean Earth/Polar Axis-coordinates of the ALSEP central station given by Davies and Colvin (2000) and thus only as accurate as the coordinates derived from interferometry (~10 m). Vertically the elevation contours (DEM) were controlled to selected tracks of LRO's Laser Altimeter (LOLA). The standard deviation of the elevation differences of the selected LOLA profiles and the corresponding elevations of the controlled NAC DEM was ± 1.3 m.
- Completeness Report
- horizontal: Mean Earth/Polar Axis-coordinates of the ALSEP central station given by Davies and Colvin (2000); vertical: selected tracks of LROâs Lunar Orbiter Laser Altimeter (LOLA).
- Process Description
- The map-sheet designation is L15K 20.2/30.7East COMT. "L" stands for Moon, "15K" specifies the map's scale of 1:15, 000, "20.2/30.7 East" designates the planetocentric latitude and longitude to the nearest decimal degree nearest to the center point of the map, and "COMT" is an acronym for "Controlled Orthophoto Mosaic with Topography and nomenclature". The projection is Transverse Mercator Projection. The figure for the Moon, used for the computation of the map projection, is a sphere with a radius of 1737.4 km. The map scale of 1:15000 is true on the line of tangency at 30.7°E (=central meridian). The datum (the 0 m contour) for elevations is defined as the radius of 1737.4 km. The names of geologic features which are approved by the IAU are marked in regular font. Additionally, names of features that were suggested by the Apollo team and are commonly used are provided in italic font. See the Gazetteer of Planetary Nomenclature for a complete list of IAU approved names on the Moon. We mapped the nine major geology stops of the crew (traverse stations) according to the geolocations that we determined as parking positions of the rover. The route between stations were reconstructed by referencing and adopting the NASA Apollo 17 Traverse Map (NASA Edition1 Sheet 43D1S2(25)) to the LROC orthomosaic using ESRI ArcGIS. The traverse was slightly adjusted in some places where rover tracks could be seen in the orthomosaic, and where we found that determined camera stations deviated from the mapped route. Shapefiles of the mapped traverse and station coordinates are provided as ancillary products to the Apollo 17 orthomosaic which is provided as related product. The shapefiles should be viewed and used in conjunction with the orthomosaic or the 0.25m/pixel orthoimage to ensure the same georeference.
Lineage
- Process Date
- 2018-04-09
- Source Title
- LRO LROC images
- Source Online Linkage
- {https://pds-imaging.jpl.nasa.gov/volumes/lro.html,https://pds-imaging.jpl.nasa.gov/portal/lro_mission.html}
- Source PDS Archive
- Lunar Orbiter
- PDS Status
- PDS 3 Compatible
- Attribute Accuracy Report
- Accurate to Control Net
- Horizontal Positional Accuracy Report
- Accurate to Control Net
- Vertical Positional Accuracy Report
- Accurate to Control Net
Geospatial Information
- Target
- Moon
- System
- Earth
- Minimum Latitude
- 19.9771
- Maximum Latitude
- 20.3639
- Minimum Longitude
- 30.4294
- Maximum Longitude
- 30.9162
- Direct Spatial Reference Method
- Vector
- Object Type
- Grid Cell
- Quad Name
- LQ-12
- Radius A
- 1737400
- Radius C
- 1737400
- Control Net
- LOLA and ALSEP
- Pixel Resolution (meters/pixel)
- 0.5
- Map Scale (hard-copy)
- 15000
- Vertical Coordinate System Units
- Meters
- Map Projection Name
- Transverse Mercator
- Latitude Type
- Planetocentric
- Longitude Direction
- Positive East
- Longitude Domain
- -180 to 180