Pre-MB image mosaic of soil
Ortho mosaic of soil based on the digital elevation model
Post-MB image mosaic of rock
Post-RAT brush ortho mosaic of rock based on the digital elevation model
Post-RAT image mosaic of rock
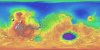
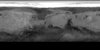
This global image map of Mars has a resolution of 256 pixels/degree (scale approximately 231 m/pixel at the equator). The black-and-white mosaic is processed to emphasize local topographic features.…
The 1:5,000,000-scale, Mariner-9 geological maps were the first to divide mars into 30 discrete latitudinal and longitudinal areas called the ‘Mars Charts’ (MCs) (Skinner et al., 2006, Gaither et…
This is a shaded relief of the original DEM described next. This data product, now at version 2, is a blend of digital elevation model (DEM) data derived from the Mars Orbiter Laser Altimeter (MOLA),…
Product Information: This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) (Smith, et al., 2001), an instrument on NASA’s Mars Global Surveyor (MGS) spacecraft (Albee, et al.,…
NASA's Mars Global Surveyor spacecraft contained the Mars Orbiter Camera, which had a wide-angle (MOC-WA) system sensitive to narrow, 50 nm-wide ranges of purple ('blue') and orange ('red') light. …
The images obtained by the HRSC (High Resolution Stereo Camera) on Mars Express show excellent potential for topographic mapping of the planet. The derived stereo models agree with topographic data…
Positional control for MDIM 2.1 comes from a new geodetic/photogrammetric solution of the global Mars Mariner 9 and Viking image control network. The details of this network solution are described…
We describe USGS topomapping of Mars at resolutions from 100 m to 30 µm with data from the latest spacecraft missions. Analysis of NASA 2001 Mars Odyssey Thermal Emission Imaging System (THEMIS)…
Launched in 1996, Mars Global Surveyor (MGS) carries two types of mapping equipments: Mars Orbiter Laser Altimeter (MOLA) and Mar Orbiter Camera (MOC). MOLA collects accurate laser altimetry data…
This paper focusses on the estimation of exterior orientation parameters of the High Resolution Stereo Camera (HRSC) orbiting planet Mars during the European Mars Express mission since January 2004.…
In January 2004 the first European interplanetary spacecraft, Mars Express, was inserted successfully into a Martian orbit. The multiline scanner HRSC (High Resolution Stereo Camera) on board of…
This paper presents the technology and experimental results for high-precision landing-site mapping and rover localization developed for the ongoing 2003 Mars Exploration Rover (MER) mission. This…
Our project aims to automate Mars mapping and localization using robotic stereo and descent imagery. Stereo vision is a wellstudied domain. However, most efforts aim only at a general scene; little…
In a previous research effort a terrain partition framework was defined allowing the partition of the landscape of Valles Marineris chasma (an elongated steep-sided depression located in Mars) to…
Following the conceptual idea "from 3D camera to 3D view", the production of true-3D image maps for the glasses-free stereoviewing of parts of the Martian surface, is described. The image data have…