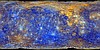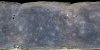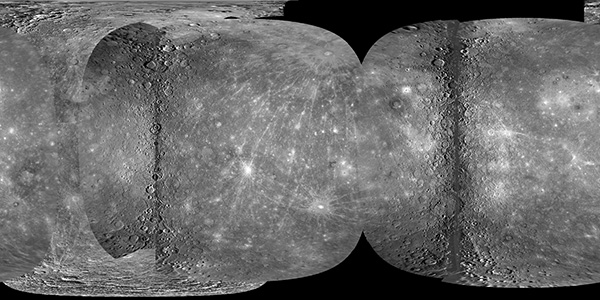
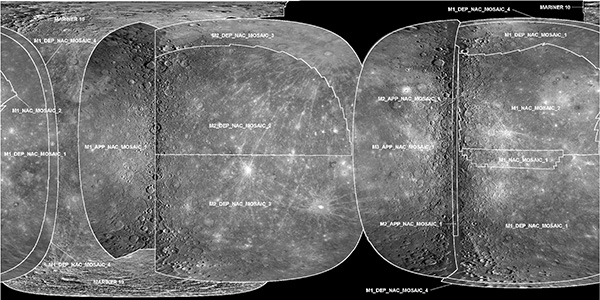
This mosaic represents the best geodetic map of Mercury's surface to date. MESSENGER's three flybys alone provide 90.90% of the data in the global mosaic (see Table above). Although MESSENGER went in to safe mode during the third flyby, the approach imaging was acquired and contributes ~6.82% additional coverage from earlier versions. Only the poles remain to be imaged, some of which are in permanent shadow.
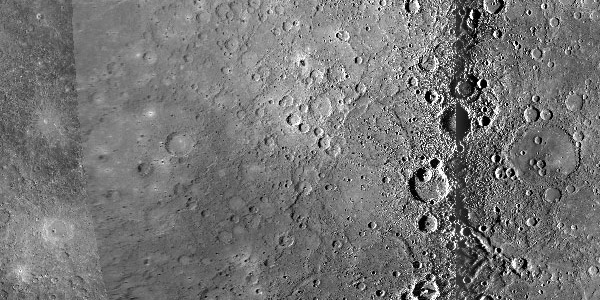
The mosaic is comprised entirely of flyby data (Mariner 10 also had three Mercury flybys). The images were collected with large variations in resolution (see table below) and with varying lighting conditions while the spacecraft was traveling at speeds greater than 2 km/sec. It has been photometrically corrected using a Hapke-Henyey-Greenstein photometric model. Pixel density values are in I/F reflectance units. The darker vertical regions to left and right of center are coverage provided by images near or at the terminator (low Sun). These areas required special processing to retain illuminated features that are otherwise eliminated at incidence angles greater than 90° when the photometric model is applied.
The "smeared" data at the outer overlapping edges of the observations are limb images. These images are at high emission angles resulting in distortion within a derived map projection. The limb data are trimmed at lower emission angles in order to visually limit this effect. The mosaic is provided at 500 meters/pixel (~85.17 pixels/degree) resolution, planetocentric latitudes with a center latitude of 0.0., and -180 to +180 positive east longitudes with a center longitude of 0.0.