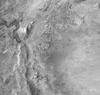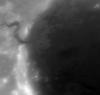
Mars MRO HiRISE Hadriacus Palus DEM 1m and Orthophoto 50cm Mosaics
- Primary Authors
- James Skinner Jr.
- Originators
- Corey Fortezzo
- Publisher
- USGS Astrogeology Science Center
- Abstract
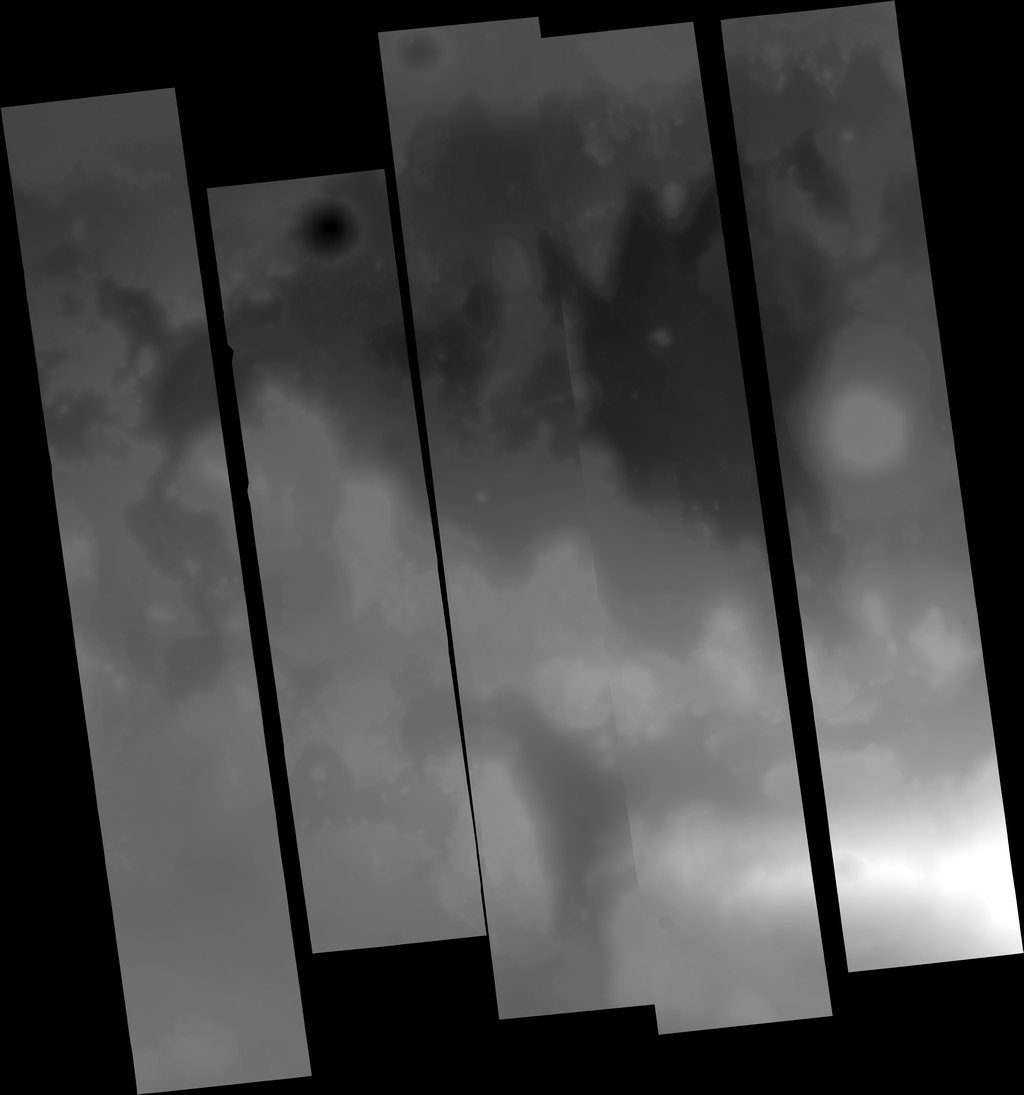
- Product Information: This archive contains the Hadriacus Palus digital elevation model (DEM) and Orthophoto Mosaics generated from High Resolution Imaging Space Experiment (HiRISE) stereo images onboard the Mars Reconnaissance Orbiter (MRO) spacecraft. HiRISE DEMs are made from two images of the same area on the ground, taken from different look angles. All the stereo pairs acquired so far are available here. Not all of these have been made into DEMs due to the time-intensive process. Creating a DEM is complicated and involves sophisticated software and a lot of time, both computing time and human operator time. The great advantage of a HiRISE DEM is the high resolution of the source images. As a general guide, terrain can be derived at a post spacing about 4 time the pixel scale of the input images. HiRISE images are usually 0.25 - 0.5 meters per pixel (m), so the post spacing is 1-2 m with vertical precision in the tens of centimeters. Images (red channel) used for DEM creation: ESP_033282_1525, ESP_032781_1525, ESP_032636_1525, ESP_032425_1525, ESP_032359_1525, ESP_032069_1525, ESP_031924_1525, ESP_026412_1525 Mission and Instrument Information: NASA's Mars Reconnaissance Orbiter (MRO), launched August 12, 2005, is on a search for evidence that water persisted on the surface of Mars for a long period of time. While other Mars missions have shown that water flowed across the surface in Mars' history, it remains a mystery whether water was ever around long enough to provide a habitat for life. MRO successfully arrived at Mars on March 10, 2006. The mission has shown unprecedented detail in orbital images of Mars. The Hi Resolution Imaging Science Experiment (HiRISE camera) is a push-broom imaging system featuring a 0.5 m aperture telescope with a 12 m focal effective length and 14 CCD detectors capable of generating images of up to 20,000 cross-scan observation pixels and 65,000 un-binned scan lines. The HiRISE instrument capabilities include the acquisition of observations of the Mars surface from orbit with a ground sampling dimension between 25 and 32 cm/pixel. HiRISE data sets are produced by the HiRISE Team at the University of Arizona Lunar and Planetary Laboratory, Tucson (PDS IMG, 2018). Reference: Skinner, J. A., Hare, T. M., Fortezzo, C. M., & Rickman, D. L. (2015). Considerations for Human Exploration of an Exhumed, Intercrater Basin in the Martian Cratered Highlands: The Hadriacus Palus and Cavi Example. Paper presented at First Landing Site/Exploration Zone Workshop for Human Missions to the Surface of Mars, Lunar and Planetary Institute, Houston, TX. https://ui.adsabs.harvard.edu/abs/2015LPICo1879.1052S Planetary Data Systems (PDS) Cartography and Imaging Sciences (IMG) (2018). Mars Reconnaissance Orbiter (MRO). https://pds-imaging.jpl.nasa.gov/portal/mro_mission.html
- Purpose
- These were created to support geologic mapping and landing site analysis for the Hadriacus Palus region on Mars.
Contact and Distribution
- Format
- Digital Elevation Model, Image, Remote-sensing Data, Shaded-Relief Map
- Access Constraints
- Please cite authors
- Access Scope
- PDS
- Use Constraints
- None
- Supplemental Information
- https://www.hou.usra.edu/meetings/explorationzone2015/pdf/1052.pdf, http://onlinelibrary.wiley.com/doi/10.1029/2007JE003000/full , https://hirise.lpl.arizona.edu/
- Native Data Set Environment
- GDAL
- Astrogeology Theme
- Geographic Information System (GIS), Geomorphology, Remote Sensing, Topography
- Mission Names
- Mars Reconnaissance Orbiter
- Instrument Names
- HiRISE
- Online Package Link
- https://astrogeology.usgs.gov/search/map/mars_mro_hirise_hadriacus_palus_dem_1m_and_orthophoto_50cm_mosaics
- External File Size
- 159 MB
- Online File Link
- https://planetarymaps.usgs.gov/mosaic/Mars/HadriacusPalus/HadriacusPalus_DEM_mosaic_1m_Equi0_16bit.tif
- Contact Address
- 2255 N. Gemini Drive
- Contact City
- Flagstaff
- Contact State
- AZ
- Contact Postal Code
- 86001
- Contact Email
- [email protected]
Data Status and Quality
- Time Period of Content (start)
- 2015-09-01
- Time Period of Content (stop)
- 2015-12-01
- Currentness Reference
- Publication date
- Progress
- Complete
- Update Frequency
- None planned
- Logical Consistency
- There will be some seams from slight boundary mismatches.
- Process Description
- The basic steps of creating a DEM are: * Prepare the images for ingestion into the stereo software * Triangulate the images * Generate the DEM * Edit DTM if necessary * Orthorectify images * optionally mosaic the DEMs In order to prepare the images, we must first correct the geometry by removing any optical distortions inherent to HiRISE. Then the spacecraft pointing information at the time of each observation is gathered. Triangulation, also called bundle adjustment, requires the most operator skill and time. The purpose of triangulation is to register the stereo images to each other and to the MOLA elevations. The end result is tied to the global elevation map produced by the MOLA instrument team. This is the same map that you see in the context map pane of every HiRISE observation page. Once the images are triangulated, then the terrain model can be generated. This step is computationally intensive, but automated, so it just takes a lot of computer time. The output of terrain extraction is reviewed for any artifacts or errors. These are edited out if possible. Since editing is extremely time-consuming, it is usually done on easily corrected errors and in the areas of most interest to the researcher. The less editing we have to do, the better, so a lot of effort goes into preparing the images so that the input is as high quality as possible. The excellent contrast and value range of HiRISE imagery usually result in high quality terrain extraction that requires minimal editing. After we have a terrain model, we can make other products, such as orthoimages. An orthoimage is a picture that has been orthorectified. This means that the pixels have been projected so that at each pixel it is as if you are looking directly down at the terrain. In the original stereo images, we rely on the fact that there are topographical distortions (parallax) to derive the elevations in the terrain model. In the orthoimages, all topographic distortions have been removed. Orthoimages are made of the source stereo pair for a DEM. If other images exist that cover the DEM, we can also orthorectify them. The final products are map projected using the same mapping definitions as the regular HiRISE RDR products.
Lineage
- Process Date
- 2014-09-01
- Source Title
- High Resolution Imaging Science Experiment Archive
- Source Online Linkage
- {https://pds-imaging.jpl.nasa.gov/volumes/mro.html,https://pds-imaging.jpl.nasa.gov/portal/mro_mission.html}
- Source PDS Archive
- Mars Reconnaissance Orbiter
- PDS Status
- PDS 3 Like
- Attribute Accuracy Report
- Accurate to Control Net
- Horizontal Positional Accuracy Report
- Accurate to Control Net
- Vertical Positional Accuracy Report
- Best Effort
Geospatial Information
- Target
- Mars
- System
- Mars
- Minimum Latitude
- -27.56819044383465
- Maximum Latitude
- -27.02262882393292
- Minimum Longitude
- 77.95835880273373
- Maximum Longitude
- 78.46859337606257
- Direct Spatial Reference Method
- Raster
- Object Type
- Grid Cell
- Raster Row Count (lines)
- 32338
- Raster Column Count (samples)
- 30244
- Bit Type (8, 16, 32)
- 16
- Quad Name
- MC-21
- Radius A
- 3396190
- Radius C
- 3396190
- Bands
- 1
- Pixel Resolution (meters/pixel)
- 1
- Scale (pixels/degree)
- 59274.69752330622
- Map Projection Name
- Equirectangular
- Latitude Type
- Planetocentric
- Longitude Direction
- Positive East
- Longitude Domain
- -180 to 180