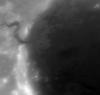

Mars 2020 Terrain Relative Navigation Context Camera Orthorectified Image Mosaic
- Originators
- USGS Astrogeology Science Center
- Publisher
- USGS Astrogeology Science Center
- Publication Date
- 2020-07-24
- Abstract
- This is a visible image mosaic generated from the Context Camera (CTX) images from the Mars Reconnaissance Orbiter mission. This product is the Lander Visions System (LVS) map that will be onboard the spacecraft and will be the "truth" dataset that TRN will use to orient itself relative to the surface during Entry, Decent, and Landing. The images were orthorectified using digital terrain models (DTMs) created from CTX stereo images. The mosaic is generated at the same resolution at which the individual CTX images were acquired, which is approximately 6 meters per pixel. This mosaic was created in support of the Mars 2020 rover, which will explore Jezero crater, Mars to investigate an ancient delta for evidence of past microbial life and to better understand the geologic history of the region. The landing system onboard Mars 2020 will use technology developed at the Jet Propulsion Laboratory (JPL) called Terrain Relative Navigation (TRN), which will enable the spacecraft to autonomously avoid hazards (e.g., rock fields, crater rims) that exceed the safety requirements of the landing system. This capability allows small-scale hazards to be present in the landing ellipse, providing greater flexibility in selecting a landing location. In support of TRN, the USGS Astrogeology Science Center has generated and delivered this product, which is the Lander Vision System (LVS) map. This mosaic is available on this site, along with the individual CTX orthorectified images that make up the mosaic and the CTX DTMs used to derive the orthorectified images. Digital Terrain Model (DTM) mosaic product page. Individual images, DTMs, and metadata: https://asc-pds-services.s3.us-west-2.amazonaws.com/mosaic/mars2020_trn/CTX/index.html References: Fergason, R. L., Hare, T. M., Mayer, D. P., Galuszka, D. M., Redding, B. L., Smith, E. D., Shinaman, J. R., Cheng, Y., Otero, R. E., 2020, Mars 2020 Terrain Relative Navigation Flight Product Generation: Digital Terrain Model and Orthorectified Image Mosaics, 51st Lunar and Planetary Science Conference, URL: https://www.hou.usra.edu/meetings/lpsc2020/pdf/2020.pdf. Malin, M.C. et al., 2007, Context Camera Investigation on board the Mars Reconnaissance Orbiter, J. Geophys. Res. 112, E05S04, doi:10.1029/2006JE002808, URL: https://agupubs.onlinelibrary.wiley.com/doi/full/10.1029/2006JE002808%4010.1002/%28ISSN%292169-9100.MARSROM1 DOI Link: https://doi.org/10.5066/P9GV1ND3
- Purpose
- The purpose of this work was to generate and deliver the Lander Vision System (LVS) map generated from three Context Camera (CTX) orthorectified images that will be onboard the spacecraft and will be the "truth" dataset that TRN will use to orient itself relative to the surface during Entry, Decent, and Landing. This mosaic also served as the ground truth data set for the High-Resolution Imaging Science Experiment (HiRISE) orthomosaic that was the basemap onto which surface hazards were mapped.
Contact and Distribution
- Format
- Grey Scale, Image, Landing Site Map, Remote-sensing Data
- Access Constraints
- None
- Access Scope
- Astrogeology
- Use Constraints
- Please cite authors
- Supplemental Information
- https://www.hou.usra.edu/meetings/lpsc2020/pdf/2020.pdf, https://www.nasa.gov/press-release/nasa-announces-landing-site-for-mars-2020-rover, https://www.jpl.nasa.gov/news/news.php?feature=7442
- Native Data Set Environment
- GDAL, ISIS v3
- Astrogeology Theme
- Exploration, Image Processing, Photogrammetry, Remote Sensing
- Mission Names
- Mars 2020, Mars Reconnaissance Orbiter
- Instrument Names
- CTX
- Online Package Link
- https://astrogeology.usgs.gov/search/map/mars_2020_terrain_relative_navigation_context_camera_orthorectified_image_mosaic
- External File Size
- 35 MB
- Online File Link
- https://planetarymaps.usgs.gov/mosaic/mars2020_trn/CTX/JEZ_ctx_B_soc_008_orthoMosaic_6m_Eqc_latTs0_lon0.tif
- Contact Address
- 2255 N. Gemini Drive
- Contact City
- Flagstaff
- Contact State
- AZ
- Contact Postal Code
- 86001
- Contact Email
- [email protected]
Data Status and Quality
- Time Period of Content (start)
- 2006-01-01
- Time Period of Content (stop)
- 2019-08-20
- Currentness Reference
- Publication date
- Progress
- Complete
- Update Frequency
- None planned
- Logical Consistency
-
The individual CTX images have an average horizontal displacement of 9.6 meters. Thus, these products and the resulting mosaic meet, and often exceed, the requirements for TRN.
To assess the horizontal registration, measurements between orthorectified images were made using the Open Source software package IMCORR (https://nsidc.org/data/velmap/imcorr.html). The approach used by IMCORR is the same basic matching strategy used in a variety of stereo photogrammetry software packages, and when applied to a pair of orthorectified images, the results can be interpreted as a measure of the co-registration of the images.
- Completeness Report
- When selecting Context Camera (CTX) images for this mosaic, we incorporated the minimum number of high quality stereo pairs that fully covered the Mars 2020 Terrain Relative Navigation (TRN) Enty, Decent, and Landing (EDL) region. This resulted in three CTX stereo pairs: J03_046060_1986_XN_18N282W.cal.pgm/J03_045994_1986_XN_18N282W.cal.pgm; F05_037607_2008_XN_20N282W.cal_sub.pgm/F05_037752_2008_XN_20N282W.cal_sub.pgm; and J21_052811_1983_XN_18N282W.pgm/J22_053233_1984_XN_18N282W.pgm. There was a small gap in the northwest corner of the mosaic region, which was filled with CTX image J03_046060_1986_XN_18N282W that was orthorectified to the High-Reslution Stereo Camera (HRSC) Digital Terrain Model (DTM), since we did not generate a CTX DTM over this area.
- Process Description
- To achieve the required horizontal and vertical co-registration requirements for the Lander Visions System (LVS) map that will be onboard the Mars 2020 spacecraft, we developed a DTM mosaic generation pipeline using a combination of SOCET SET from BAE Systems and the Ames Stereo Pipeline (ASP) software. The images in this mosaic were orthorectified using DTMs created from CTX stereo images using this process. We first improved our CTX image pre-processing pipeline to include capabilities that utilize camera model and jitter-correction improvements developed and provided by JPL. These modifications have significantly improved the positional knowledge of the images relative to the martian surface and have allowed us to generate DTMs without the need for a typically required bundle adjustment. Omitting this step was desirable, as TRN is sensitive to non-linear distortions that could potentially be introduced by a bundle adjustment. After DTMs were produced using SOCET SET from input images and image metadata provided by JPL, the initial DTMs were then rigidly aligned to one another using the pc_align program from ASP, allowing only a translation adjustment. The relatively-aligned DTMs were then simultaneously aligned using ASP to the High Resolution Stereo Camera (HRSC) Level 5 DTM to bring them into absolute alignment with an independent reference. The CTX DTMs have been manually edited to remove erroneous posts. Manual editing to modify these incorrect elevation values improves the quality and accuracy of the DTM, thereby improving the quality and accuracy of derived orthorectified images. The orthorectified images were derived from the nadir-most member of each stereopair (6 meters per pixel) and were mosaicked using the Ames Stereo Pipeline program dem_mosaic. The TRN landing system is sensitive to image seams within the mosaic, and so we have implemented methods to both match the tone, or brightness, between images and remove any remaining seams observed. Tone matching was a manual process to align the tone of each individual orthoimage. A single value was added across an entire image to shift each individual image to one another using the Open Source GDAL program gdal_translate (https://gdal.org/). In order to match CTX image J21, an offset of 30.0 was added to J03 and offset of 15.0 was subtracted from F05. Mosaicking and seam blending were accomplished using the ASP dem_mosaic tool. For the orthomosaic, a 120-pixel linear seam blend was applied, and input images were ordered in the mosaics in order to push image seams as far from the center of the final cropped area as possible. The final cropped DTM mosaics have a grid spacing of 20 meters/pixel. The final cropped orthomosaics were produced at grid spacings of 6 meters/pixel and 20 meters/pixel, with the 20 meter/pixel variant derived from the uncropped 6 meters/pixel orthomosaic. There is a small region within the northwest corner of the cropped CTX mosaic bounding box that is not covered by a CTX DTM. To fill this region for a continuous mosaic, we orthorectified CTX image J03_046060_1986_XN_18N282W onto the HRSC DT5 product and placed the resulting orthoimage into the final orthomosaic. Unless otherwise stated, all data, metadata and related materials are considered to satisfy the quality standards relative to the purpose for which the data were collected. Although these data and associated metadata have been reviewed for accuracy and completeness and approved for release by the U.S. Geological Survey (USGS), no warranty expressed or implied is made regarding the display or utility of the data for other purposes, nor on all computer systems, nor shall the act of distribution constitute any such warranty. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government.
- Source Title
- Context Camera Investigation on board the Mars Reconnaissance Orbiter
- Source Online Linkage
- https://pds-imaging.jpl.nasa.gov/volumes/mro.html
- Source PDS Archive
- Mars Reconnaissance Orbiter
- PDS Status
- PDS 3 Compatible
- Horizontal Positional Accuracy Report
- Accurate to Control Net
Geospatial Information
- Target
- Mars
- System
- Mars
- Feature Name
- Jezero crater
- Minimum Latitude
- 18.211
- Maximum Latitude
- 18.7212
- Minimum Longitude
- 77.1605
- Maximum Longitude
- 77.6992
- Direct Spatial Reference Method
- Raster
- Object Type
- Grid Cell
- Raster Row Count (lines)
- 5040
- Raster Column Count (samples)
- 5322
- Bit Type (8, 16, 32)
- 8
- Quad Name
- Radius A
- 3396190
- Radius C
- 3396190
- Control Net
- MOLA
- Bands
- 1
- Pixel Resolution (meters/pixel)
- 6
- Scale (pixels/degree)
- 9879.116
- Map Projection Name
- Equirectangular
- Latitude Type
- Planetocentric
- Longitude Direction
- Positive East
- Longitude Domain
- -180 to 180