Product Information: The Lunar Orbiter Laser Altimeter (LOLA) and SELenological and Engineering Explorer (SELENE) Kaguya Teams have created an improved lunar digital elevation model (DEM) covering…
In 2019, NASA's OSIRIS-REx (Origins, Spectral Interpretation, Resource Identification, and Security – Regolith Explorer) mission globally surveyed asteroid (101955) Bennu with a collection of…
The Solid State Imager (SSI) on NASA's Galileo spacecraft acquired more than 500 images of Jupiter's moon, Europa, providing the only moderate- to high-resolution images of the moon's surface. Images…
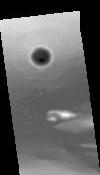
This is a shape-from-shading (SfS or photoclinometry) digital elevation model (DEM) for the Haworth area. The Haworth area is beyond the north rim of Haworth crater and centered at 338.0 (-21.0) E,…
This 3D point cloud describes the global shape of Saturn’s moon Enceladus. The model is both near-global in extent and relatively high "resolution", and is intended to support scientific…
This orthorectified image was created by projecting an image from the Mars Reconnaissance Orbiter Context Camera (CTX) onto a Digital Terrain Model (DTM). The DTM is available under the “Derived…
This Digital Terrain Model (DTM) was produced as part of a project to understand Martian lava flows. It was constructed from a pair of Mars Reconnaissance Orbiter Context Camera (CTX) images using…
This paper presents the technology and experimental results for high-precision landing-site mapping and rover localization developed for the ongoing 2003 Mars Exploration Rover (MER) mission. This…
Our project aims to automate Mars mapping and localization using robotic stereo and descent imagery. Stereo vision is a wellstudied domain. However, most efforts aim only at a general scene; little…
The High Resolution Stereo Camera (HRSC) on board of the European space mission Mars Express provides multispectral digital image data in high resolution as well as the systematic stereo coverage of…