Sols 1313-1315: Full MAHLI wheel imaging
15 April 2016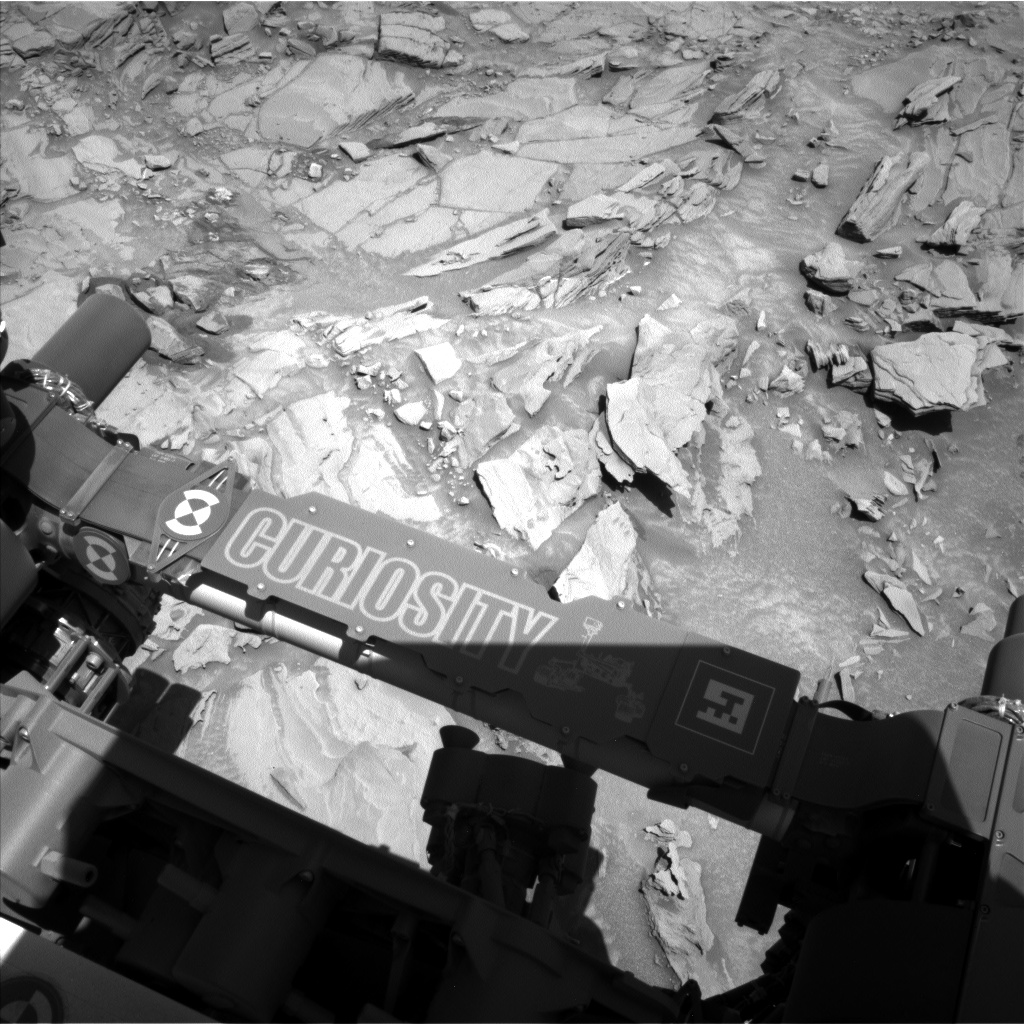
Tactical planning was a bit hectic today as we reacted to yesterday's
change in the near-term science goals, but the team quickly determined
what is feasible and put together a good plan. There are no good
brushable targets in the arm workspace, so the DRT will not be used. Rather, we selected 3 targets for MAHLI
imaging and APXS measurements of natural surfaces. I'm MAHLI/MARDI
uplink lead today, and have been very busy!
The Sol 1313 plan starts with a mid-day ChemCam observation of the sky
and Mastcam images of the Sun to measure the amount of dust in the
atmosphere. The arm will be deployed that afternoon to take MAHLI
images of "Kasane" and "Uau," on either side of a bright/dark boundary
in the outcrop. MAHLI will then take pictures of another bedrock target
dubbed "Onesi" and of the rover wheels. The APXS will be placed on
Onesi for a couple evening integrations, then on Uau for an overnight
integration.
Early the next morning, Navcam will search for clouds and Mastcam will
measure dust again by imaging the Sun. Later that morning, MAHLI will
take pictures of the REMS ultraviolet sensor, which is done periodically
to see how much dust is on the sensor. Then the remote sensing
instruments get busy: Mastcam will take a multispectral image of
"Gariep," a few rocks that were broken/crushed by the rover wheels, then
ChemCam and Mastcam will observe Uau, Kasane and a bedrock target named
"Kolmanskop." The RMI will acquire a 5x1 mosaic of Mount Sharp, Mastcam will take stereo images of the "Rasthoff" area and image the Sun again, and Navcam will search for clouds. Finally, the APXS will be placed on Kasane for an overnight integration, in parallel with a SAM scrubber cleaning activity.
On Sol 1315, the rover will complete the full set of MAHLI wheel images,
bumping in between images to ensure that all parts of the wheels are
imaged. The usual set of post-drive images will then be acquired to set
us up for planning on Monday, when we will probably drive again.
by Ken Herkenhoff
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.